Усовершенствованная система управления двухкоординатным поворотным устройством с интерфейсом RS485
Сегодня на рынке стали доступны направленные антенны, эффективность которых намного выше ненаправленных. В силу этого обстоятельства радиолюбители всё чаще стали использовать антенны в своей практике. Для работы в эфире направленную антенну необходимо поворачивать в сторону нахождения корреспондента, а при работе через искусственные спутники земли ещё и учитывать угол места, на котором находится спутник-ретранслятор в данный момент.
В журналах [1] и [2] была опубликована статья о системе управления поворотным устройством с интерфейсом RS485, где в качестве датчиков угла поворота используются абсолютные магнитные энкодеры AS5045. В представленной статье рассматривается усовершенствованная система управления двухккординатным поворотным устройством, построенная на основе системы, опубликованной в вышеуказанных номерах журнала.
Для минимизации количества проводников в кабеле связи, посредством которого осуществляется коммуникация между контроллером управления, располагающемся на рабочем месте оператора, и блоками управления поворотным механизмом, на котором закреплена антенна, как и в предыдущей конструкции используется цифровой интерфейс передачи данных RS485 [3]. Используя данный подход требуется кабель управления, содержащий всего четыре жилы, подходящего сечения. Две из них используются для питания блоков управления поворотным механизмом, и два из них для шины передачи данных посредством последовательного интерфейса RS485. Длина кабеля при этом может достигать 1200 метров.
Двухкоординатное поворотное устройство имеет две оси, одна из которых поворачивает антенну по азимуту, а другая меняет угол её элевации. Для управления каждой из осей используется отдельный блок управления, получающий питание и обменивающийся информацией с контроллером управления по общему четырёхжильному кабелю.
Каждый блок управления поворотным механизмом содержит датчик угла поворота оси, управляемый установленным в блоке микроконтроллером, интерфейс обмена данными по шине RS485, а также систему транзисторных ключей, предназначенную для управления реле, посредством которых производится управление электроприводами механизмов изменения азимута и элевации.
Структурная схема системы управления двухкоординатным поворотным устройством с интерфейсом RS485 показана на рисунке 1.
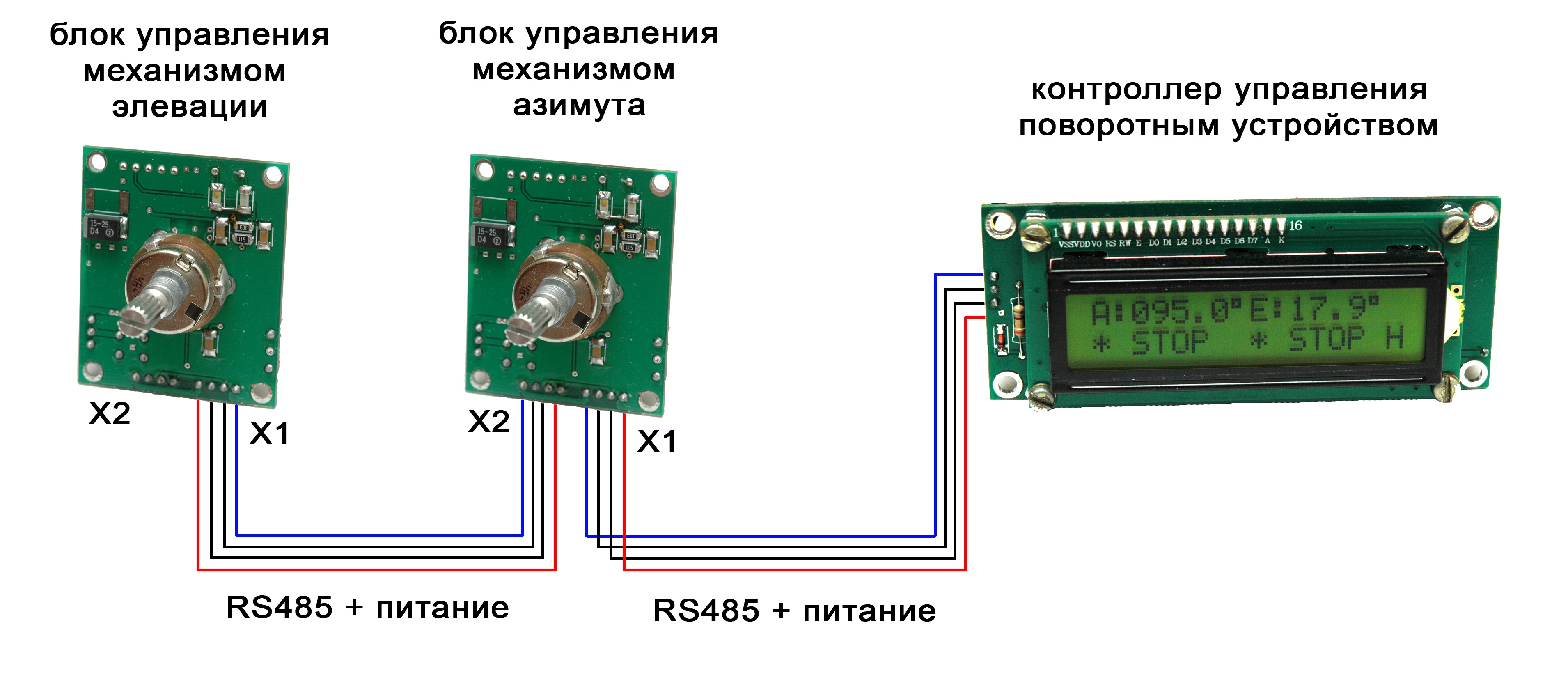 Рис. 1 Структурная схема системы управления двухкоординатным поворотным устройством с интерфейсом RS485
Рис. 1 Структурная схема системы управления двухкоординатным поворотным устройством с интерфейсом RS485
Блок управления механизмом азимута и блок управления механизмом элевации являются идентичными устройствами за исключением программы микроконтроллера в каждом из блоков.
Принципиальная схема блока управления одной из осей представлена на рисунке 2. Для измерения угла поворота оси в блоке используется «абсолютный» магнитный энкодер угла поворота DD1 – AS5045ASST [4]. Он представляет собой микросхему, содержащую на кристалле массив элементов Холла и блока цифровой обработки сигналов. Датчик определяет направление магнитных силовых линий поля магнита, располагающегося непосредственно над ним, и посредством последовательного интерфейса выдаёт цифровую информацию об угле поворота.
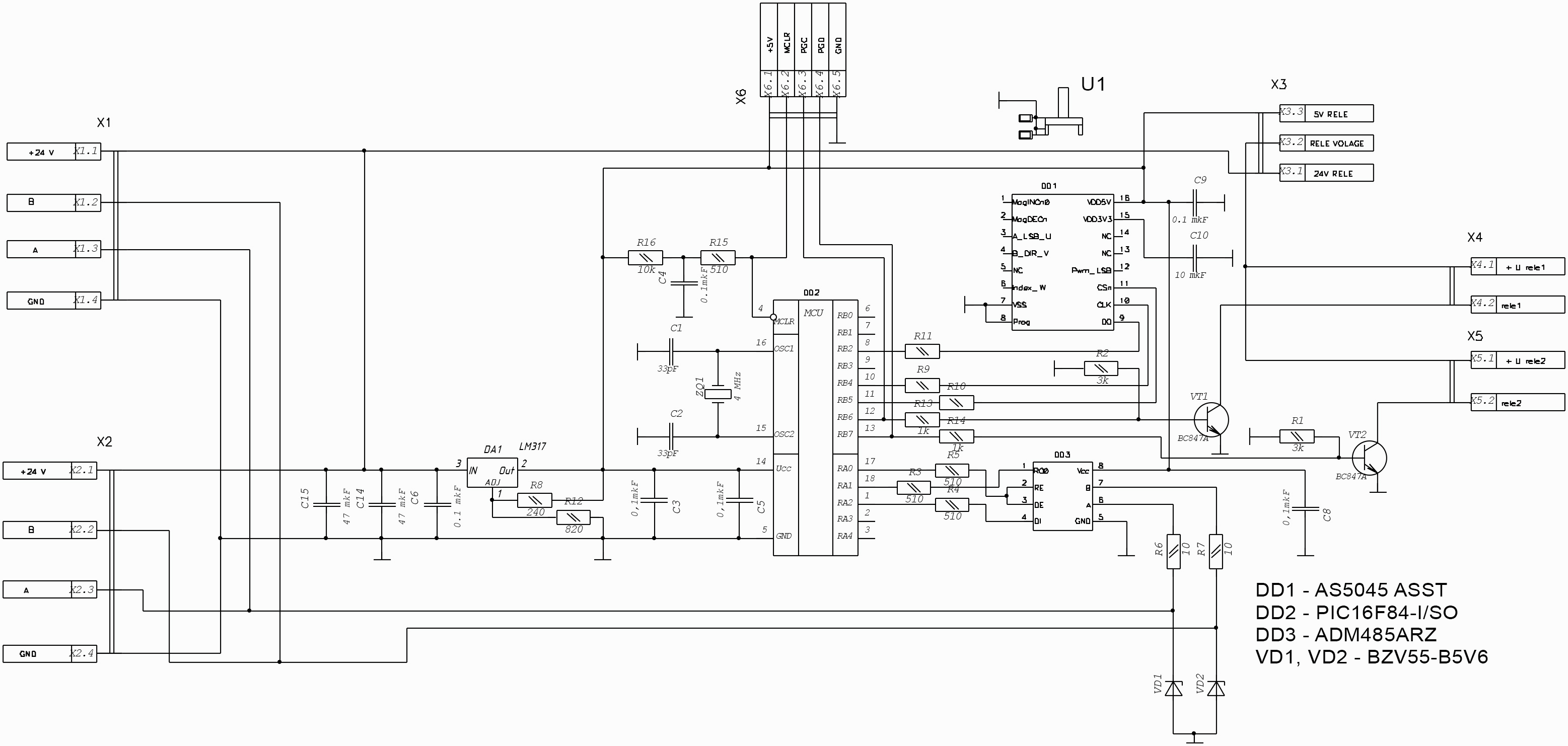
Рис. 2 Принципиальная схема блока управления
Датчик является - 12 разрядным, поэтому окружность делится на 4096 позиции, что в результате позволяет измерять угол поворота с точностью 0,1 градуса. Поворотный магнит размещается непосредственно над центром микросхемы на высоте 1 – 2 мм.
Считывание данных из энкодера DD1 производится с помощью микроконтроллера DD2, который после соответствующей обработки отправляет их, посредством интерфейса RS485, контроллеру управления поворотным устройством. Для организации интерфейса RS485 в блоках управления используются микросхемы-приёмопередатчики DD3 - ADM485 [5]. Выводы управления и передачи данных приёмопередатчиков RS485 подключаются к выводам управляющего микроконтроллера DD2 через токоограничивающие резисторы R3, R4, R5. Сигнальные цепи А и В интерфейса RS485 через резисторы R6 и R7 выведены на разъёмы X1 и X2 и защищены от импульсных помех с помощью стабилитронов VD1 и VD2. На эти же разъёмы подведены цепи напряжения питания блока +24 В и цепи общего провода схемы. Оба разъёма X1 и X2 абсолютно идентичны и используются для подключения как к следующему блоку управления или к контроллеру управления поворотным устройством. У блока, подключенным к кабелю передачи данных последним один разъём остаётся свободным. Таким образом, сигнальные контакты и контакты питания обоих блоков управления механизмами осей оказываются подключенными к соответствующим контактам контроллера управления поворотным устройством параллельно. Поскольку питание поворотного устройства производится с использованием того же кабеля, что и для передачи данных, следует учитывать соответствие мощности и напряжения выбираемого для питания системы источника питания, а также соответствие сечения жил кабеля, используемого в системе управления.
Компоненты блоков управления механизмами питаются от интегрального стабилизатора DA1 - LM317D2T [6], обеспечивающем выходное напряжение +5В. Исходя из параметров этого стабилизатора, напряжение питания, подаваемое на блок управления, может находиться в пределах 8..37В постоянного тока. При использовании приводных двигателей поворотных механизмов с напряжением питания, находящемся в этих пределах, их можно питать этим же напряжением. В варианте поворотного устройства, используемого автором, применяются электродвигатели постоянного тока с напряжением питания 24В. При использовании электродвигателей с напряжением питания, выходящим за указанные пределы, для их питания необходимо использовать отдельный источник питания либо преобразователь на соответствующее напряжение.
Обмотки реле управления электродвигателем, поворачивающим антенну вокруг соответствующей оси, подключаются к контактам разъёмов X4 и X5. Сигналы управления реле формируются на выводах RB6 и RB7 микроконтроллера DD2 и усиливаются транзисторами VT1 и VT2. Контакты реле собираются в схему, показанную на рисунке 3. При повороте антенны работает только одно реле и двигатель вращается в сторону, соответствующей выбранному направлению поворота. Когда оба реле находятся в одинаковом состоянии электродвигатель остановлен.
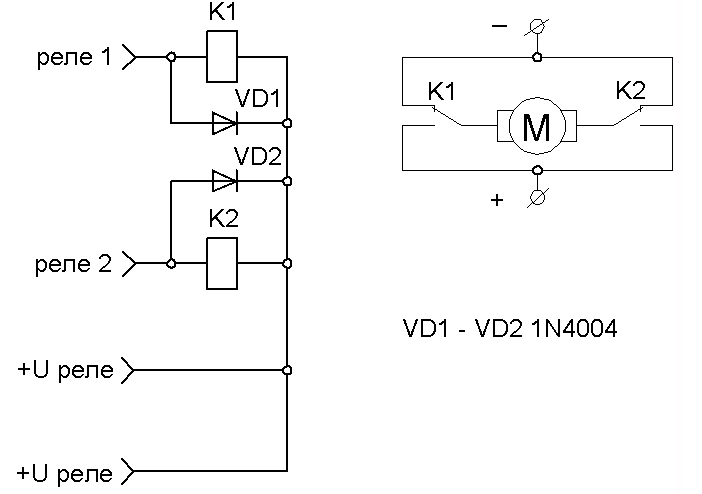
Рис. 3 Реверсивная схема управления двигателем постоянного тока
В блоках управления предусмотрена возможность переключения напряжения питания обмотками реле, управляющими электромотором. Возможно выбрать из двух вариантов напряжений: 5В и напряжение питания блока управления. В случае авторской конструкции 24В. Выбор напряжение питания обмоток реле осуществляется с помощью разъёма X3. Устанавливая перемычку между контактами 1 и 2 напряжение составит 24В, а при установке перемычки между контактами 3 и 2 – 5В. Реле, управляющие электродвигателем, устанавливаются на отдельной плате, расположенной в подходящем месте внутри поворотного устройства, как можно ближе к управляемому двигателю и соединяются с контактами платы блока управления с помощью отрезков проводов, подходящего сечения.
Для программирования микроконтроллера DD2 предназначен разъём X6, к которому подключается программатор.
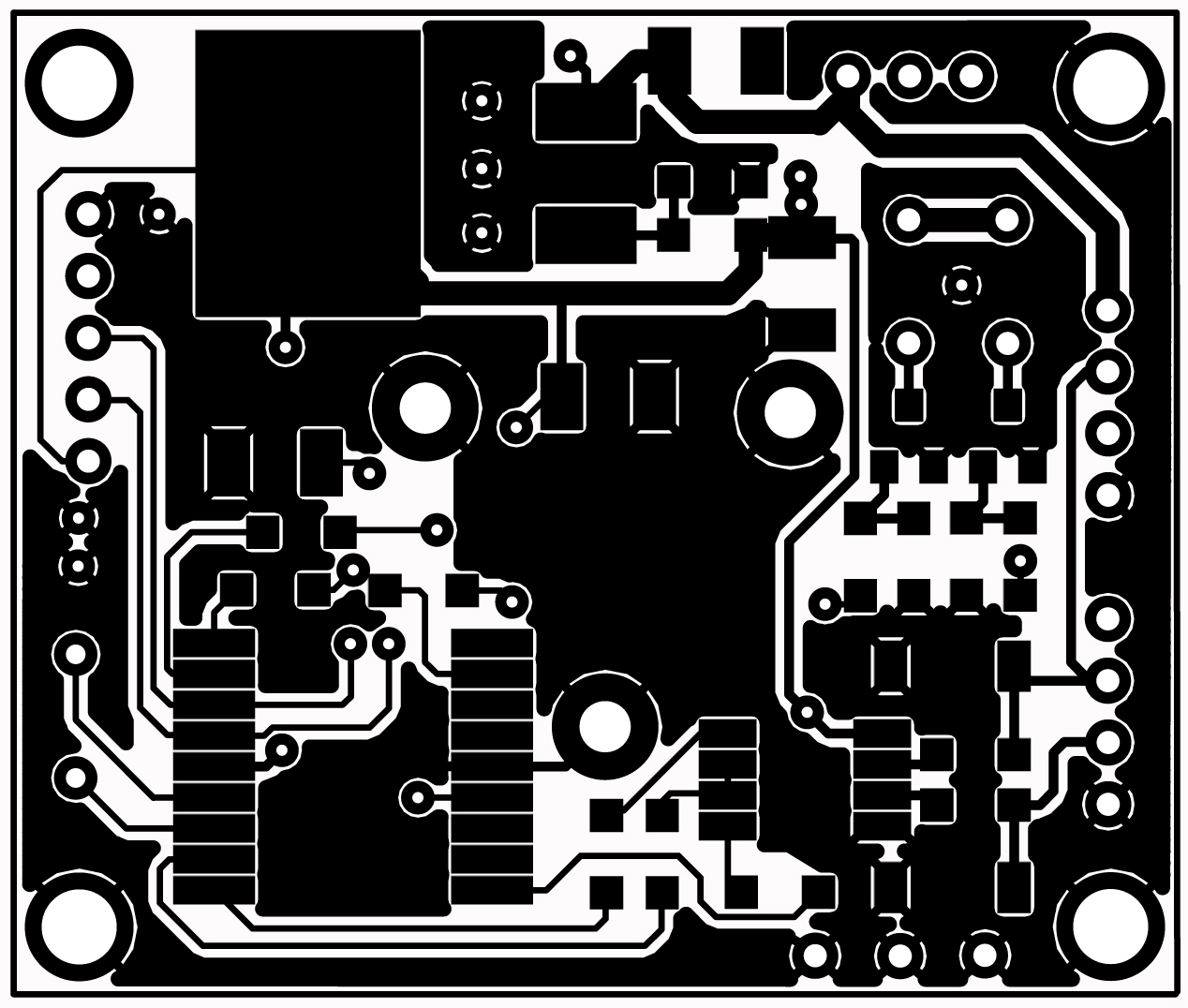
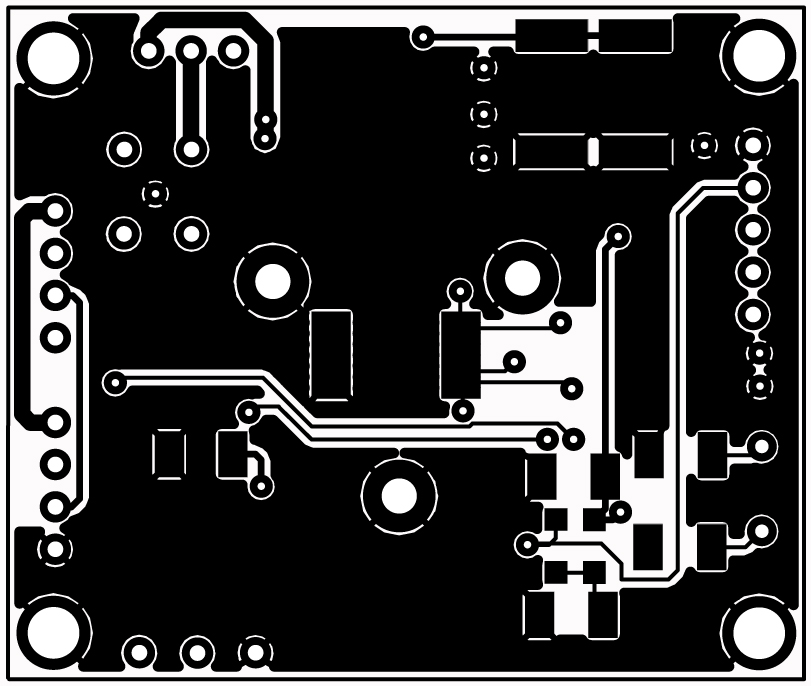
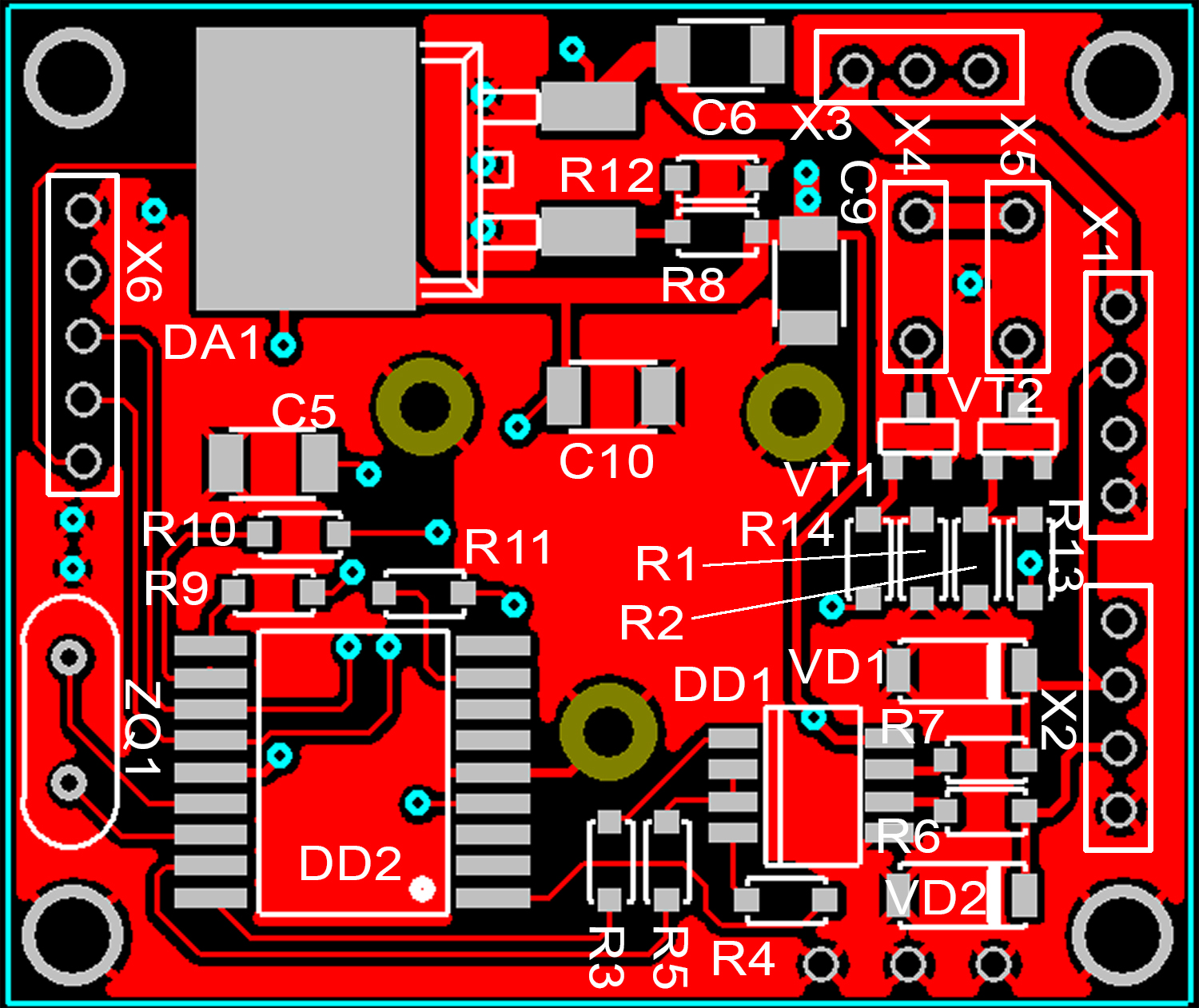
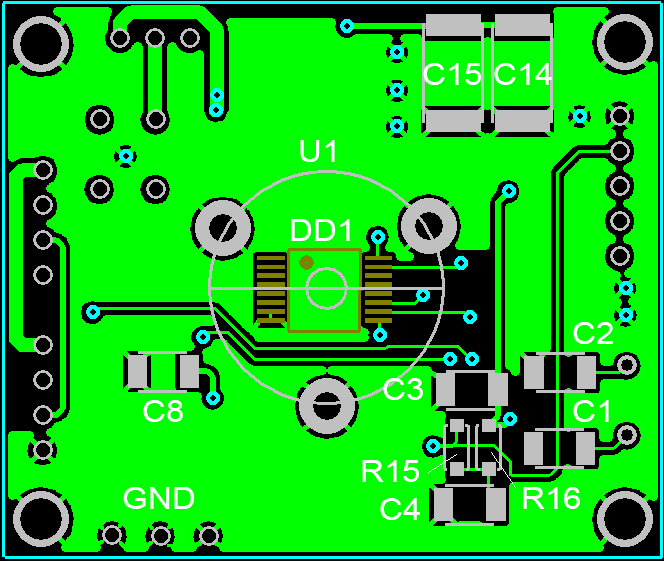
Блок управления собран на двухсторонней печатной плате из фольгированного стеклотекстолита размерами 48x40мм и толщиной 1,5 мм. Чертежи печатных проводников платы блока управления показаны на рисунках 4 и 5, а расположение деталей на плате показан на рисунках 6 и 7.
 |
 |
|
Рис.4 Печатные проводники слоя ТОР платы блока управления |
Рис.5 Печатные проводники слоя BOTTOM платы блока управления |
 |
 |
|
Рис.6 Расположение деталей на слое ТОР платы блока управления |
Рис.7 Расположение деталей на слое BOTTOM платы блока управления |
Плата полностью рассчитана на применение компонентов поверхностного монтажа. Резисторы типоразмера 1206, конденсаторы С14 и С15 танталовые типоразмера D, рассчитанные на напряжение 50В, остальные конденсаторы керамические типоразмера 1206.
Интегральный стабилизатор напряжение DA1 в корпусе D2PAK, но при необходимости его можно заменить аналогичным стабилизатором LM317T в корпусе TO220, укоротив его выводы. Вывод, в этом случае удаляется полностью, а в место него используется основание охлаждения корпуса микросхемы. Микроконтроллер DD2 марки PIC16F84-04I/SO [7] в корпусе SOIC18. Транзисторы VT1 и VT2 марки BC847A [8] в корпусе SOT23. Вместо них возможно применить и другие транзисторы n-p-n в корпусе SOT23, подходящие по максимальным параметрам. Кварцевый резонатор на 4 МГц в корпусе HC-49U.
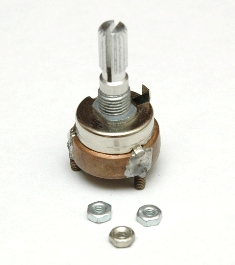
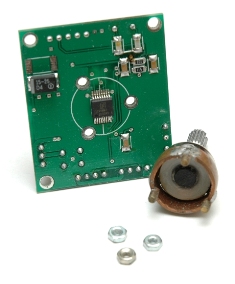
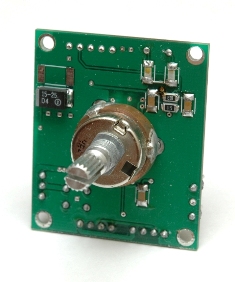
Магнитный энкодер угла поворота AS5045 установлен в центре печатной платы блока контроля. Магнит марки AS5000-MA6H [9], закреплённый на валу поворотного узла, располагается непосредственно над магнитным энкодером, как можно точнее к его центру. Поворотный узел изготовлен из потенциометра подходящих размеров и медной втулки подходящего диаметра с установленными на ней резьбовыми шпильками, предназначенными для крепления поворотного узла к печатной плате с помощью гаек. Вал с магнитом фиксируется на втулке посредством пайки. Латунные шпильки с резьбой М2,5 и длиной 8 мм также впаяны в соответствующие вырезы медной втулки. Такая конструкция обеспечивает надёжность фиксации магнита над микросхемой - энкодером, что влияет на устойчивость показаний прибора, а также позволяет легко снять поворотный узел с магнитом, если необходимо получить доступ к магнитному энкодеру. Конструкция поворотного узла с магнитом изображения на рисунке 8 и 9, плата блока контроля с магнитным энкодером и с установленным поворотным блоком магнита показана на рисунке 10 и 11.
 |
 |
|
Рис.8 Магнит в узле поворота |
Рис.9 Узел поворота магнита |
 |
 |
|
Рис.10 Магнитный энкодер на плате блока контроля угла |
Рис.11 Поворотный узел магнита установлен на плате блока контроля угла |
Схема контроллера управления поворотным устройством изображена на рисунке 12. Он реализован на микроконтроллере DD2 марки PIC18F452-I/L [10]. Информация о положении и состоянии поворотного устройства выводятся на двухстрочный жидкокристаллический дисплей (DV1602 YGH-CTK [11] или аналогичный ему). Подстроечным резистором R6 регулируется контрастность изображения. Резистор R37 токоограничивающий, предназначен для снижения яркости свечения подсветки дисплея. Это снижает общее токопотребление устройства и делает восприятие дисплея более комфортным для оператора.
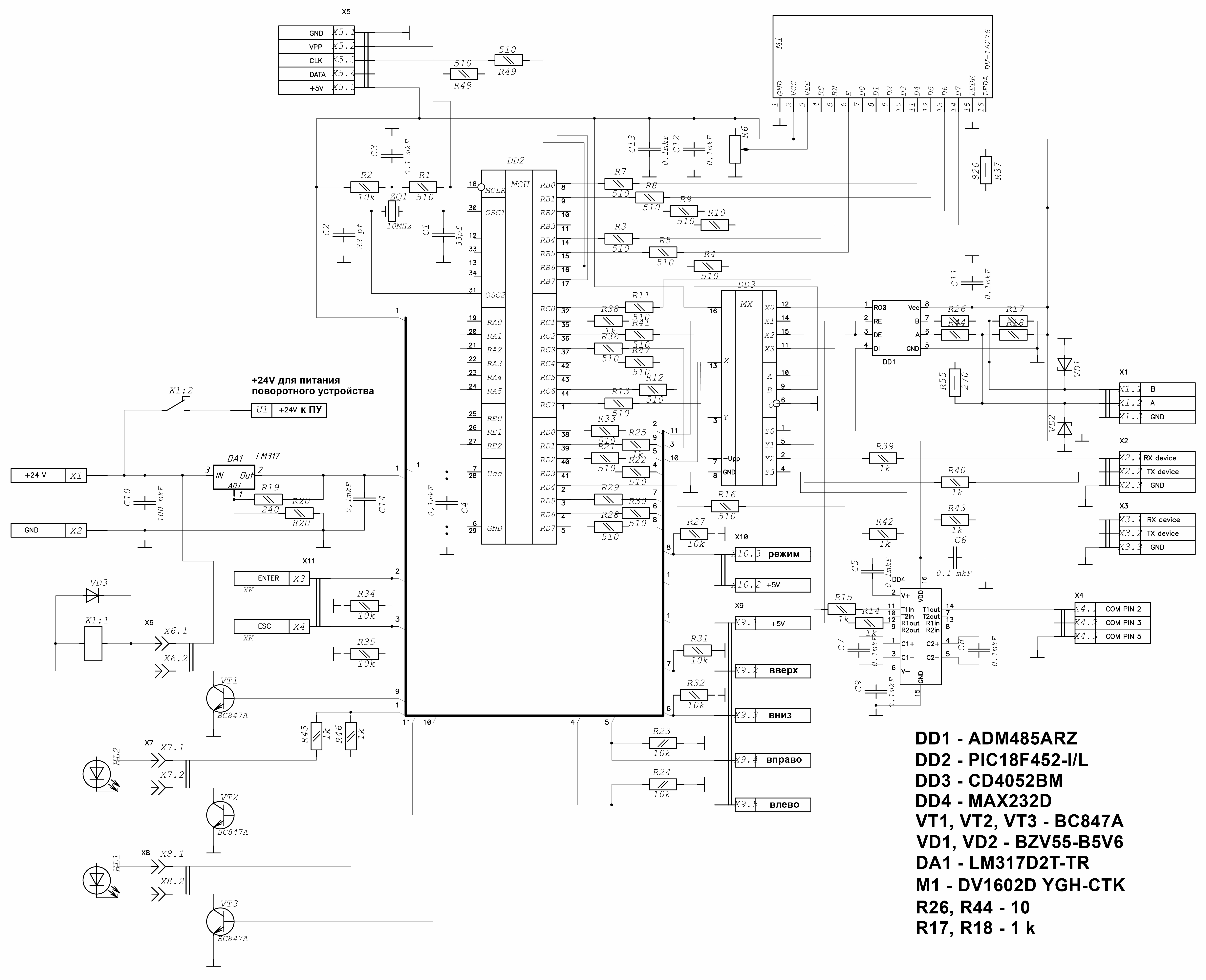
Рис.12 Схема электрическая принципиальная контроллера управления поворотным устройством
Предусмотрены два режима управления поворотным устройством: ручной и автоматический. Режимы переключаются с помощью выключателя SA1, подключаемому к разъёму X10. Когда выключатель разомкнут, включается ручной режим управления, а когда замкнут, то автоматический. В ручном режиме оператор радиостанции производит управление поворотным устройством с помощью кнопок SB1 – SB4, подключаемых к разъёму X9, контроллер формирует соответствующую команду для блоков управления поворотного устройства и через мультиплексор DD3 передаёт её в приёмопередатчик интерфейса RS485 DA3. Затем команда по кабелю питания и передачи данных, подключенного к разъёму X1, поступает к блока управления, установленным на поворотном устройстве. Блоки управления принимают команду и, если она принадлежит блоку, он выполняет её, а если команда не принадлежит блоку, он её игнорирует. После выполнения команды блок формирует ответный пакет информации и отправляет его обратно контроллеру. Приняв ответный пакет информации микроконтроллер DD2 анализирует его и выводит на индикатор информацию об угле поворота устройства и его состоянии. Вход и выход в меню контроллера управления, а также настройка параметров управления поворотным устройством производится с помощью кнопок SB5 – SB6, подключаемых к разъёму X11. Схема кнопочного блока к контроллеру поворотного устройства изображена на рисунке 13.
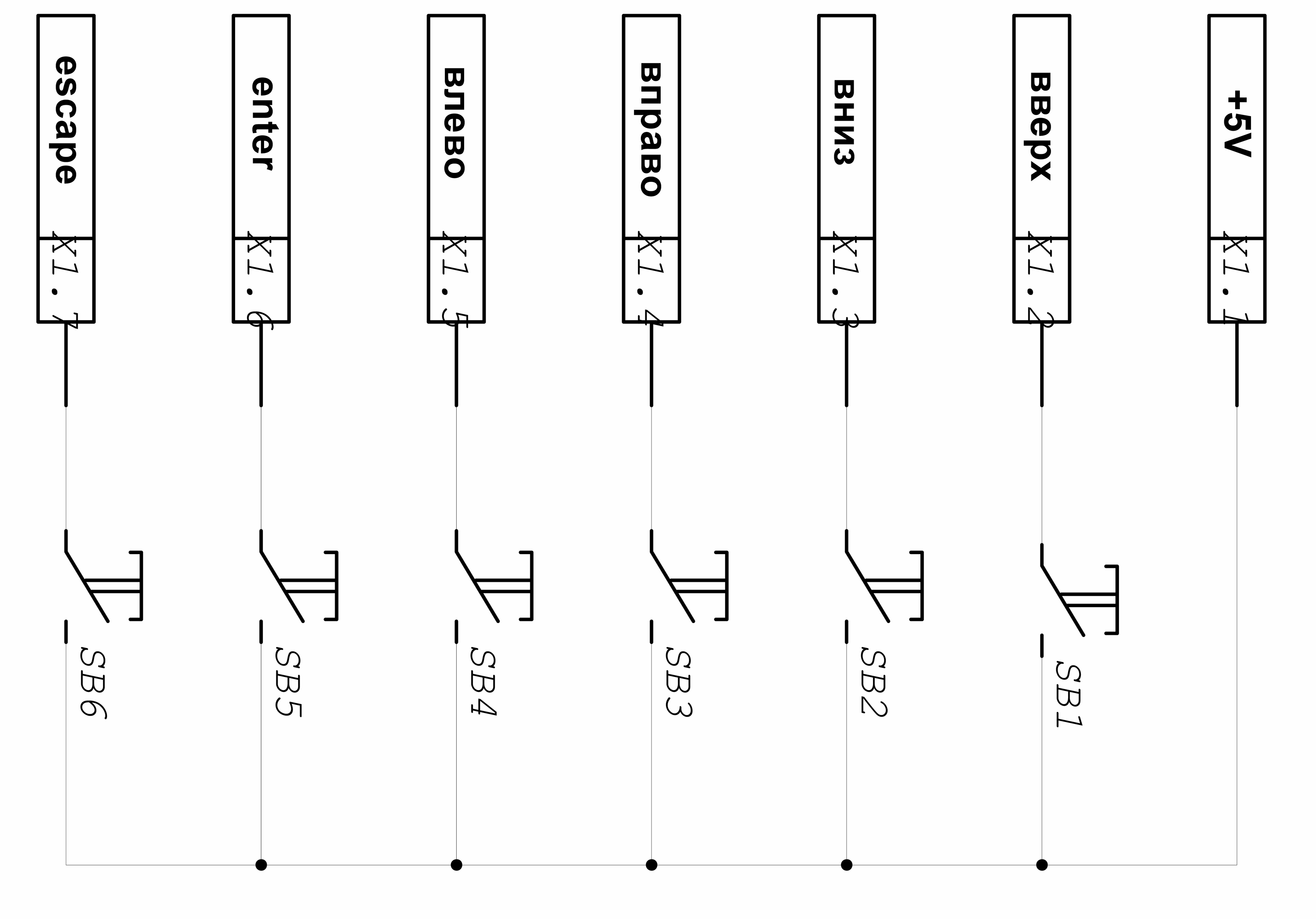
Рис.13 Принципиальная схема кнопочного блока для подключения к контроллеру управления
С помощью кнопок SB3 и SB4 выполняют поворот антенны в азимутальной плоскости, соответственно по часовой и против часовой стрелки. Кнопками SB1 и SB2 изменяют поворот антенны по углу места вверх и вниз. В программе микроконтроллера предусмотрено ограничение вращения по азимуту и углу элевации. Во избежание перекрута кабеля антенны и кабеля управления поворотным устройством ограничиваются максимальные углы поворота в обе стороны от нулевого направления антенны. При достижении максимального угла контроллер прекращает вращение в этом направлении и включает светодиод HL2, подключаемый к разъёму X7. При достижении максимального угла места подъём антенны также прекращается и включается светодиод HL1, подключаемый к разъёму X8. Углы ограничения вращения настраиваются в меню контроллера управления.
Кнопки SB5 и SB6 служат для работы с меню программы контроллера управления. Нажатием на кнопку SB5 “MENU/OK” производится вход в меню, вход в раздел меню и подтверждение установленных в разделах меню настроек и параметров. Кнопка SB6 “ESC” служит для выхода из раздела меню, а также производит выход из меню контроллера к рабочему экрану.
В автоматическом режиме поворотное устройство управляется от компьютера через COM-порт и микросхему - преобразователь данного интерфейса DD4 – MAX232D [12]. Данные угла поворота антенны, а также угла места вычисляются и передаются контроллеру от программы «Orbitron» [13], с использованием драйвера «WispDDE» [14]. По результатам сравнения данных, полученных от программы «Orbitron» и данных об установке антенны в определённом направлении принимается решение о необходимости вращения антенны для установки её в заданном направлении.
Для непрерывного слежения за положением спутника в контроллере предусмотрен импульсный режим подстройки угла азимута и угла места антенны. При действии импульсного режима подстройки двигатель привода поворачивает антенну на небольшой угол вокруг соответствующей оси. Регулировка угловых размеров зоны подстройки направления в импульсном режиме производится в соответствующем разделе меню контроллера управления и для каждого конкретного механизма поворотного устройства подбирается экспериментально. Также в меню контроллера устанавливается размер зоны изменения углов, внутри которой перемещение антенны производится только в импульсном режиме.
В контроллере управления предусмотрена возможность использования в качестве интерфейса связи с компьютером не только COM-порта, но и других, например USB и Bluetooth. Для этого используется микросхема – мультиплексор DD3, соответствующие каналы которой выведены через токоограничивающие резисторы на контакты разъёмов X2 и X3. К ним возможно подключить преобразователи RS232 <-> USB и RS232 <-> Bluetooth. Выбор интерфейса для связи с компьютером осуществляется в соответствующем меню контроллера управления.
Программирование контроллера DD2 производится через разъём X5, к которому подключаются сигналы программатора.
При включении питания программа микроконтроллера DD2 выполняет инициализацию, и после этого, включив транзистором VT1 реле K1, подаёт напряжение питания на поворотное устройство. Проверяется наличие связи с блоками управления азимутом и элевацией. При наличии связи с блоками контроллер переходит к программе управления поворотным устройством, в противном случае, если отсутствует связь с одним или обоими блоками, контроллер выводит сообщение об ошибке и до устранения неисправности управление поворотным устройством прекращает. В процессе управления поворотным устройством также проверяется наличие связи с блоками управления. Если она прерывается контроллер управления производит отключение питания блоков поворотного устройства на короткое время, что заставляет их контроллеры перезапуститься. Если после перезапуска связь с блоками управления не возобновилась, управление поворотным устройством будет заблокировано до устранения неисправности, т.к. не получая никаких команд блоки управления блокируют вращение антенны.
Напряжение питания, подаваемое на контроллер может находиться в пределах 8..37В. В авторской конструкции применялось напряжение 24В, соответствующее напряжению питания электродвигателей приводов поворотного устройства. Мощность источника питания должна быть достаточной для питания всех потребителей поворотного устройства. Питание микросхем контроллера производится от интегрального стабилизатора напряжения DA1, настроенного на напряжение 5В.
Контроллер управления собран на печатной плате из фольгированного с двух сторон стеклотекстолита размерами 95х38мм. Топология печатных проводников платы изображена на рисунках 14 и 15. Расположение деталей на соответствующих сторонах печатной платы изображено на рисунках 16 и 17.
Рис.14 Топология печатной платы контроллера управления. Сторона TOP
Рис.15 Топология печатной платы контроллера управления. Сторона BOTTOM
Рис.16 Расположение деталей на печатной плате контроллера. Сторона TOP
Рис.17 Расположение деталей на печатной плате контроллера. Сторона BOTTOM
Резисторы R37 и R55 марки МЛТ-0,25, остальные постоянные резисторы типоразмера 1206 для поверхностного монтажа. Резистор R6 подстроечный марки СП3-19а. Конденсатор C10 танталовый, рассчитанный на напряжение 50В, остальные конденсаторы керамические типоразмера 1206 для поверхностного монтажа. Микросхему MAX232D можно заменить на аналогичную ADM202JRN. Вместо стабилизатора LM317D2T в корпусе D2PAK можно применить стабилизатор LM317T в корпусе TO220, укоротив выводы и используя вместо центрального вывода крепление к радиатору охлаждения. Знакосинтезирующий дисплей марки DV1602D YGH-CTK устанавливается на стойках непосредственно на плату контроллера управления и подключается к контактам разъёма М1. Контроллер управления с установленным дисплеем изображён на рисунке 18.

Рис.18 Контроллер управления с установленным дисплеем
Диод VD3 марки 1N4007 устанавливается непосредственно на выводы реле К1, вынесенное за пределы платы и устанавливаемое в любом удобном месте корпуса. Выводы питания катушки реле подключаются к разъёму X6 проводами подходящего сечения. Выбирать реле для питания поворотного устройства необходимо исходя из соображений мощности потребления всех узлов поворотного устройства. Контакты реле должны выдерживать токи, протекающие через них при работе всех узлов при полной нагрузке. Автор, для питания поворотного устройства в своём варианте, использовал реле постоянного тока, с обмоткой на напряжение 24В марки Finer 44.62.9.024.0000. Кнопки SB1-SB6 и выключатель SA1 могут быть любыми, соответствующими эргономике применяемого корпуса. Светодиоды HL1 и HL2 марки 204RD. Кнопки управления и светодиоды подсоединяются к соответствующим разъёмам платы контролера управления с помощью проводов, подходящей длины.
Контроллер управления крепится к передней панели корпуса подходящих размеров на стойках. Для дисплея необходимо сделать соответствующий вырез.
Подробное описание работы с меню контроллера управления поворотным устройством приводилось ранее в журнале [2] и в данной статье не рассматривается.
Могилевский И.А. (RA3PCS)
Литература
- Могилевский И. Система управления поворотным устройством с интерфейсом RS485. – Радиолюбитель, 2019, № 8, с. 14 – 19.
- Могилевский И. Система управления поворотным устройством с интерфейсом RS485. – Радиолюбитель, 2019, № 9, с. 10 – 15.
- Интерфейс RS485 – URL: http://www.logic-cell.ru/userfiles/File/logiccell/Interface.pdf
- AS5045 12 bit 360° progammable magnetic rotary encoder. – URL: http://www.datasheet4u.com/datasheet/A/S/5/AS5045_austriamicrosystemsAG.pdf.html
- ADM485 +5V Low power EIA RS-485 Tranceiver Analog Devices. – URL: http://www.chipfind.ru/datasheet/ad/adm485.htm
- LM217, LM317 1,2 to 37V adjustable voltage regulators. – URL: http://www.st.com/web/catalog/sense_power/FM142/CL1015/SC315/PF63704?referrer=70032480
- PIC16F84A Data Sheet 18-pin Enhanced FLASH/EEPROM 8-bit Microcontroller. – URL: http://datasheet.su/datasheet/Microchip/PIC16F84A-04I/P
- Транзистор BC847A – URL: http://datasheet.su/datasheet/Philips/BC847A
- AS5000-MA6H-1 Magnet rotary position sensor. – URL: http://www.ams.com/eng/Products/Position-Sensors/Magnets/AS5000-MA6H-1
- PIC18FXX2 High Performance, Enhanced FLASH Microcontrollers with 10-Bit A/D. – URL: http://datasheet.su/datasheet/Microchip/PIC18F452-I/L
- Дисплей DV1602D YGH-CTK. – URL: http://www.compel.ru/infosheet/WINSTAR/WH1602A-YGH-CTK/
- MAX232 +5V powered, multichanel RS232 drivers/recievers. – URL: http://www.alldatasheet.com/datasheet-pdf/pdf/73047/MAXIM/MAX232.html
- Stoff S. Orbitron — Satellite Tracking System. — URL: http://www.stoff.pl
- – URL: http://www.g6lvb.com/wispdde_info.htm
- Прошивки микроконтроллеров
- Схемы для скачивания
- Архив топологии плат с расположением элементов для скачивания
